Описание ходовой части робота и элементов конструкции
Шасси игрушки реализовано по "вертикальной схеме". Его конструкция имеет два ведущих колеса 4 (рис. 2), ведомое - опорное 3 (условно будем его считать задним колесом) и опорный зуб 11. Он нужен для предотвращения опрокидывания робота при резкой смене направления движения.
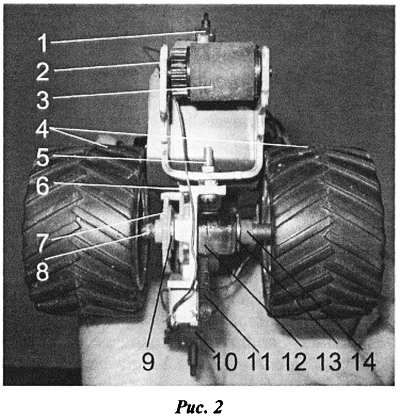
Над задним колесом, выдаваясь вперёд, расположен датчик 1. При столкновении с плоскостью преграды его контакты размыкаются. Впереди находится датчик 10, его контакты при взаимодействии с помехой работают на замыкание.
Ведомое колесо 3 закреплено к основанию 6 посредством винта М3 (элемент 5) и металлической П-образной скобы 2. Вращающийся вал 8 содержит жёстко закреплённые колёса 4, шестерню 7 с приклеенной для жесткости шайбу 9 и "кембрик" 14 (отрезок резиновой трубочки). Отрезок предотвращает продольное смещение вала. Шайба 13 уменьшает трение при вращении вала и его взаимодействии с опорной втулкой 12.
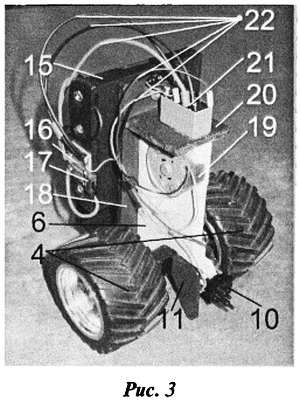
Батарейный отсек 15 рассчитан на четыре элемента питания типа АА. На его боковой поверхности приклеена контактная плата 16 (4 контактные дорожки). На ней находится выключатель питания батареи 17. Отсек прикручен к отрезку Г-образного профиля 18 винтом М3. Сам профиль приклеен к основанию 6 по всей длине боковой линии. Основанием 6 служит фрагмент пластмассового шасси DVD привода от компьютера, содержащий двигатель 19 и понижающий редуктор. Сверху к профилю приклеена пластина 20, на которую крепится миниатюрное электромагнитное реле 21 с парой переключающих контактов.
Выводы реле 21 и дорожки платы 16 образуют монтажное поле для других элементов принципиальной схемы робота. Межэлементное соединение осуществляется гибкими проводами 22. С их помощью удобнее трансформировать варианты схем устройства.
Колёса 4 изъяты из детской радиоуправляемой игрушки - машины внедорожника. Посадочные гнёзда в них рассверлены насквозь сверлом диаметром 5 мм. Вал 8 - стальной стержень диаметром 5 мм и длиной около 7 см. Шайбы 9, 13 стальные под винт М5. Втулка 12 это отрезок крепёжной стойки корпуса телевизора. В нём рассверливается имеющееся сквозное отверстие до диаметра 5,5 мм. Втулка приклеивается к основанию "секундным клеем". Концевики - кнопки 1, 10 извлечены также из привода компьютера и приклеены к основанию 6 (элемент 10) и профилю 18 (элемент 1) тоже с помощью клея. Профиль вырезается из корпуса от телевизора (используется его угол). Высота отреза около 9 см, ширина 3 см. Опорный зуб 11 выпиливается также из листовой пластмассы корпуса. Зуб сажают на клей к основанию 6. Реле (элемент 21) приклеивают к пластине 20 (пластина изготовлена из корпуса телевизора) вязким, "резиновым клеем". На вал двигателя 19 насажен пластмассовый шкив. Первое понижение частоты вращения в редукторе происходит за счёт ременной передачи, далее снижение осуществляется шестерёнками.
Порядок сборки подвижной части шасси робота
1. Из имеющегося привода вырезается основание - мотор и редуктор на общей подложке.
2. Крайняя шестерня редуктора снимается с оси. На её месте рассверливается сквозное отверстие (пластмассовую ось убирают). Изготавливается вал, на который жестко сажается шестерня. Для этого удобно кернером в месте посадки на валу сделать 3–4 насечки.
3. Подготавливается опорная втулка. Вал с шестерней продевается сквозь отверстие в основании, с обратной стороны надевается втулка. Её боковая сторона (к основанию) предварительно намазывается клеем. Втулку приклеиваем к основанию. Следует контролировать величину сцепления шестерни вала с ведущей шестерней, а так же положение вала по отношению к плоскости основания (осевая линия вала должна быть перпендикулярна плоскости основания).
4. Помещаем на вал шайбу и "придавливаем" её резиновым кольцом, регулируя продольный люфт вала.
5. Одеваем колёса на вал. Проверяем вращение элементов, сначала от руки, затем от электродвигателя. Потребляемый им ток должен находиться в границах 70-100 мА на холостом ходу (колёса вращаются "на воздухе").
Варианты схемных решений робота
На рисунке 4 изображён стартовый вариант схемы управления роботом.
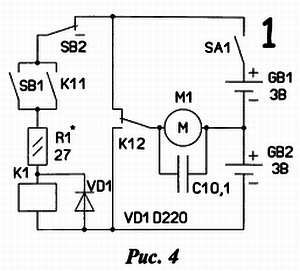
Функционирует она следующим образом. После включения батарея GB1 через свободно замкнутые контакты реле группы К1.2 запускает двигатель M1. Его ротор вращает колёса робота, и он устремляется вперёд. При столкновении с преградой кратковременно замыкаются контакты датчика SB1, срабатывает реле К1. Контактная группа К1.1 самоблокирует его обмотку. Одновременно группа К1.2 переключает двигатель на батарею GB2. Направление тока через мотор меняется на противоположное, робот начинает "бежать" в обратном направлении. При столкновении со второй преградой разомкнутся контакты SB2. Обмотка реле обесточится, робот вновь "побежит" вперёд. Резистор R1 токоограничительный. Таким образом, игрушка "метается между двумя стенками". Этакий вариант однотипно-активной деятельности, возбуждённо-целеустремлённое поведение.
К недостаткам данного варианта следует отнести использование двух групп контактов реле и большой ток потребления при движении робота назад.
Вариант, представленный, на рисунке 5 лишён этих недостатков.
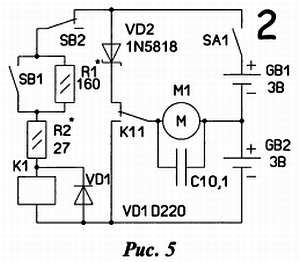
Резистор R1 может ограничивать ток реле до величины тока удержания якоря. А он существенно ниже тока срабатывания. В авторском варианте робота резистор R1 составлял 470 ом (с экземпляром реле HLS-4078-DC5B фирмы HELISHUN). Диод VD2 развязывающий. Он предотвращает разряд батареи GB2 через обмотку мотора, контакты SB2, резисторы R1, R2 на обмотку реле при выключенной игрушке. В остальном работа схемы повторяет предыдущий вариант.
Схема (рис. 6) меняет алгоритм поведения робота.
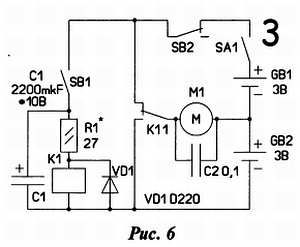
В исходном состоянии игрушка приставлена к преграде (контакты SB2 разомкнуты). После включения робот неподвижен, как бы на привязи. Но стоит слегка отвести преграду (замкнуть SB2) и робот устремляется вперёд. При его столкновении с предметом концевик SB1 замыкается, конденсатор С1 быстро заряжается, реле переключается. Робот "пятится назад". Так происходит пока конденсатор разряжается через обмотку реле, поддерживая замкнутыми свободно разомкнутые контакты К1.1. Далее игрушка вновь атакует преграду. Таким образом, данный схемный вариант реализует агрессивно-активное поведение робота. Остановить его можно поймав за "хвост" (придавить толкатели концевика SB2).
Противоположный, покладистый характер игрушки нам демонстрирует вариант схемы на рисунке 7.
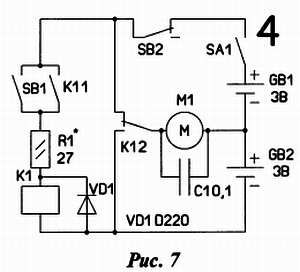
Небольшое изменение по сравнению с первым вариантом и поведение робота резко меняется: потеряв опору, он движется к новой преграде, но скоро возвращается назад, чтобы вновь обрести былую твёрдость уже навсегда…. Да, а всего лишь перекинули один контакт SB2.
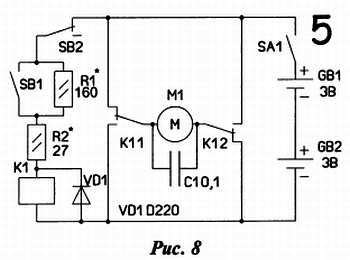
Довольно часто не удаётся найти двигатель на низкое рабочее напряжение. Тогда приходится питать его от всей батареи сразу.
Здесь нам может пригодиться сэкономленная группа контактов. Вариант схемы с питанием мотора напряжением 6 В изображён на рисунке 8. Поведенческий сценарий повторяет первый вариант.
И напоследок - ещё один вариант "неуправляемой агрессии" - рисунок 9.
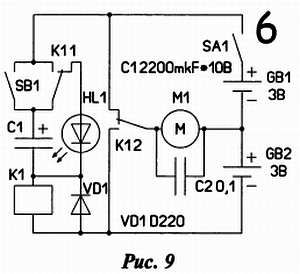
В схему добавлен красный сигнальный светодиод HL1- начала атаки препятствия. После включения питания робот устремляется в атаку на преграду. Столкнувшись (замыкание контактов SB1) он отскакивает и вновь бросается на "обидчика". Происходит это так: ток через контакты SB1 и разряженный конденсатор С1 подаётся на обмотку реле. Группа К1.1 самоблокирует реле, однако ток быстро убывает по мере зарядки конденсатора. Когда он снижается до величины ниже тока удержания реле - ток в цепи прерывается, робот начинает бежать вперёд. Одновременно конденсатор С1 разряжается через светодиод HL1 - он вспыхивает и цикл повторяется вновь.
Вариации схем и соответствие характера поведения сведены в таблицу (рис. 10).