КИНЕМАТИКА ДВИЖЕНИЙ ЧЕЛОВЕКА
В биомеханике под кинематикой движений понимают "геометрию", то есть пространственную форму движений человека без учета его массы и действующих сил. Кинематика дает в целом только внешнюю картину движений. Причины возникновения и изменения движений раскрывает динамика.
Положение тела человека в пространстве в биомеханике принято описывать его местоположением, ориентацией и позой.
Местоположение характеризует, в какой части пространства находится в данный момент человек.
Ориентация тела иллюстрирует его поворот относительно неподвижной системы координат (вверх головой, горизонтально, вниз головой, "кругом").
Поза тела показывает взаимное расположение отдельных частей тела человека относительно друг друга.
Определение местоположения обычно не связано с большими трудностями. Чтобы определить местоположение человека как твердого тела, достаточно указать три координаты какой-либо точки тела в неподвижной системе координат X1Y1Z1. (рис. 4.).
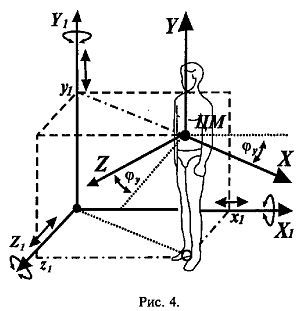
В качестве такой точки обычно выбирают центр масс (ЦМ) тела. В принятой системе координат местоположение тела определяется тремя координатами х1у1z1.
Определение ориентации тела человека - задача гораздо более трудная, особенно при сложных позах.
Прежде чем показать пути ее решения, остановимся на том, как определяются основные оси и плоскости человеческого тела.
Оси тела образуют так называемую связанную систему координат XYZ, начало отсчета которой совмещают с центром масс (ЦМ) тела.
Для того, чтобы изменение ориентации связанной системы точнее отражало изменение ориентации тела в пространстве, направление продольной оси определяют так. Тело человека (в стойке руки вверх) делится горизонтальной плоскостью на две равные по весу половины. Линия, соединяющая центры масс верхней и нижней половин тела (и проходящая через общий ЦМ), и есть продольная ось тела.
В основной стойке эта ось практически близка к вертикальной.
Поэтому продольную ось тела OY направляют вертикально; ось ОХ проводят горизонтально и называют фронтальной; ось OZ направляют перпендикулярно первым двум осям и называют сагиттальной.
Оси связанной системы первоначально ориентированы так же, как и оси неподвижной системы. При повороте (вращении) тела вместе с ним относительно неподвижной системы поворачивается и связанная система координат.
Таким образом, ориентацию тела в пространстве характеризуют три угловых координаты jx, jy, jz (так называемые углы Эйлера).
Заметим, что при сложных позах положение ЦМ может выходить за пределы тела.
В биомеханике с целью облегчить описание движений человека (в частности, при выполнении отдельных элементов упражнений, приемов и т. д.), вводят понятия плоскостей тела.
Основные плоскости тела (рис. 5.) и всякие другие, параллельные им, ориентированы в системе трех взаимно перпендикулярных осей тела.
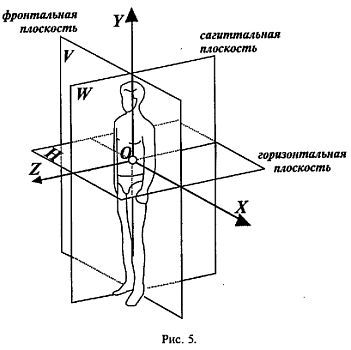
Вертикальная плоскость YOX, проходящая через ЦМ и разделяющая тело на переднюю и заднюю части (а также всякая параллельная ей плоскость), называется фронтальной.
Вертикальная плоскость YOZ, проходящая через ЦМ и разделяющая тело на левую и правую части, называется сагиттальной.
Горизонтальная плоскость XOZ, проходящая через ЦМ и разделяющая тело на верхнюю и нижнюю части, называется горизонтальной.
При описании двигательных действий человека движения его тела описываются, соответственно, в указанных основных или параллельных им плоскостях.
Основой этой силовой конструкции, его опорным сооружением, является туловище, включающее шею и позвоночник с его более чем двумя десятками межпозвоночных соединений и мышечным оснащением.
Движения человека в значительной мере зависят от строения и свойств его тела. Чрезвычайная сложность строения и многообразие свойств тела человека, с одной стороны, делают очень сложными сами движения и управление ими. Но, с другой стороны, они обусловливают чрезвычайное богатство и разнообразие движений, до сих пор недоступное в целом ни одной самой совершенной машине.
Вся двигательная деятельность человека (поддержание местоположения и ориентации тела в пространстве, его, перемещения, изменение позы и т. п.) осуществляется с помощью опорно-двигательного аппарата. Управление движениями означает управление именно опорно-двигательным аппаратом.
Исключительную роль в построении движений играет костно-суставная система (скелет). Она не только обеспечивает телу человека опору и сохранение формы, но обусловливает также высокую подвижность и разнообразие движений.
При оценке степени подвижности костно-суставной системы ее рассматривают как сложный пространственный механизм. Этот механизм, как известно, включает вполне определенное количество подвижных костей, соединенных различного рода суставами (шарнирами), обеспечивающими соответствующим частям тела от одной до трех степеней свободы.
Мышцы облегают скелет со всех сторон, где они по условиям подвижности могут понадобиться. Если у суставов имеются стороны, в которые они не должны двигаться (например, локтевой сустав должен сгибаться в стороны, а не вперед-назад), то с этих сторон вместо нежной мышечной ткани размещается более грубая связочно-сухожильная.
Так или иначе, но каждый сустав закреплен со всех сторон гибкими растяжками - мышцами или связками. При этом мышцы, кроме их прямых функций движителя, загружаются еще добавочной - опорной. Зато получается явный выигрыш по части гибкости опорной конструкции.
АНАТОМО-ФУНКЦИОНАЛЬНЫЕ ОСОБЕННОСТИ ОПОРНО-ДВИГАТЕЛЬНОГО АППАРАТА ЧЕЛОВЕКА
Перемещения человека в пространстве и исполнение двигательных функций обеспечиваются опорно-двигательной системой человеческого тела.
Опорно-двигательный аппарат человека включает три по-разному организованных подсистемы: костную, или скелет, связочно-суставную и мышечную. Первые две - скелет и связочно-суставной аппарат - представляют собой пассивную часть системы, а мышечная - активную.
Костно-суставная система
Скелет (рис. 6) обеспечивает телу человека опору b сохранение формы, а также защищает внутренние органы. Он является основной силовой конструкцией тела и воспринимает все нагрузки, действующие на человека.
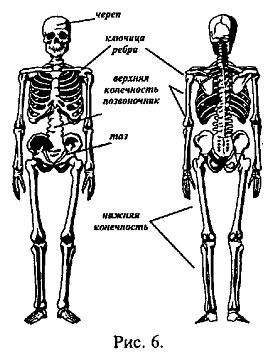
Скелет состоит из 148 подвижных костей и, соответственно, 147 сочленений (суставов).
Основой этой силовой конструкции, его опорным сооружением, является туловище, включающее шею и позвоночник с его более чем двумя десятками межпозвоночных соединений и мышечным оснащением.
В эволюционном развитии человеку пришлось дорого заплатить за прямохождение. Ходьба в вертикальном положении обусловила, прежде всего, возрастание нагрузок на позвоночник. При ходьбе на четвереньках позвоночник функционировал, к примеру, как свод моста или поперечная балка. При переходе к прямохождению он приобрел сходство с эластичной колонной, которая, изгибаясь, амортизирует толчки при ходьбе и переносит вес туловища на стопы ног. В конце концов в процессе эволюции позвоночный столб приобрел сложную S-образную форму (рис. 7).